- 2016年
- 「ドローンを利用したニホンザルの追い払い支援ロボットの開発」プロジェクトが採択されました。
お知らせ
「ドローンを利用したニホンザルの追払い支援ロボットの開発」が採択されました。
- 2016年9月21日
-
平成28年度「神奈川版オープンイノベーション」開発プロジェクトにて、明光電子がプロジェクト幹事を務める「ドローンを利用したニホンザルの追払い支援ロボットの開発」が採択されました。
このプロジェクトを、TBSテレビ放送番組「あさチャン!」にて取り上げていただくことになりました。詳細が決まり次第発表させていただきます。
プロジェクトに関する詳細は、下記をご覧ください。
ドローンを利用したニホンザルの追い払い支援ロボットの開発
(1) 開発事業者
プロジェクト幹事会社:明光電子株式会社(横浜市)
プロジェクトメンバー:株式会社野生動物保護管理事務所(東京都町田市)
開発委託先:株式会社サーキットデザイン(長野県安曇野市)
(2)追い払いの現状・課題に対する施策
| 追い払いの現状 | 現状の課題 | ドローン型ロボットによる施策 |
|---|---|---|
| 大人数で徹底的に 追い払う |
・常に十分な人数を確保するのは非現実的。 ・高齢化のため、徹底的に追い払うのが困難。 |
複数のドローン型ロボットが、サルの群れを囲い込むようにして追い払う。近隣の田畑に逃がさないように追尾する。 |
| サルを目的地まで 追い上げる |
・山深くまで、追い上げを行うことができない。 | サルにGPS首輪を装着させ、GPS情報と連動させ追尾し、山奥まで追い上げを行う。 |
| サルが出たら、 常に追い払う |
・追い払いの道具を常備して行動することができない。 ・単身では、追い払い効果が薄い。 |
GPS首輪の情報から接近を通知後、ドローン型ロボットが出動、追い払う。サルの活動時間に合わせ、1日に数回パトロールする。 |
| サルがどこにいるか 把握する |
・サルにGPS首輪を装着。 ・GPS情報を効果的に収集できていない。 |
サルにGPS首輪を装着し、GPS情報をドローン型ロボットが収集し、サルの位置を把握。 |
| モンキードッグ による追い払い |
・犬を訓練させるのに時間、手間がかかる。 | ドローン型ロボットがモンキードッグの代わりに追い払うため、手間がかからない。 |
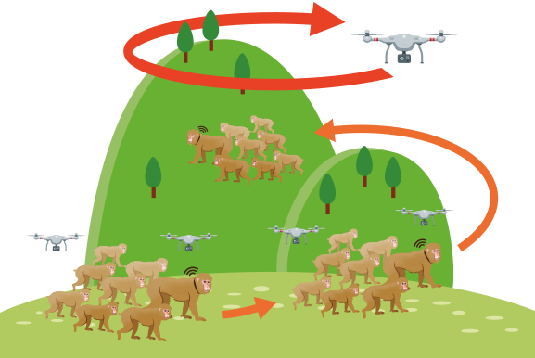
(3) 開発するロボットの概要
群れのサルにGPSを内蔵した首輪を取り付け、行動範囲をモニタリングする。
ドローン型ロボットが囲い込むようにサルを追い払う。
群れが移動しても追尾し、山まで誘導する。
(4) 今後のスケジュール
| 平成28年度 | ドローン調査、追い払い仕様検討、 自立飛行(ハードウェア、ソフトウェア開発)、追い払い実験 |
|---|---|
| 平成29年度以降 | 複数ドローンの実証実験、製品化開発、市場調査 |


 Facebook
Facebook Twitter
Twitter